Raspberry Pi Cart Robot
March 2016
Description:
Robot cart build on top of Raspberry-Pi and Adafruit DC and stepper motor hat.
Hardware:
- Robot Cart Chassis Kit
- Raspberry Pi - Model A+ (chosen for its size and low power consumption, otherwise it can be any Pi)
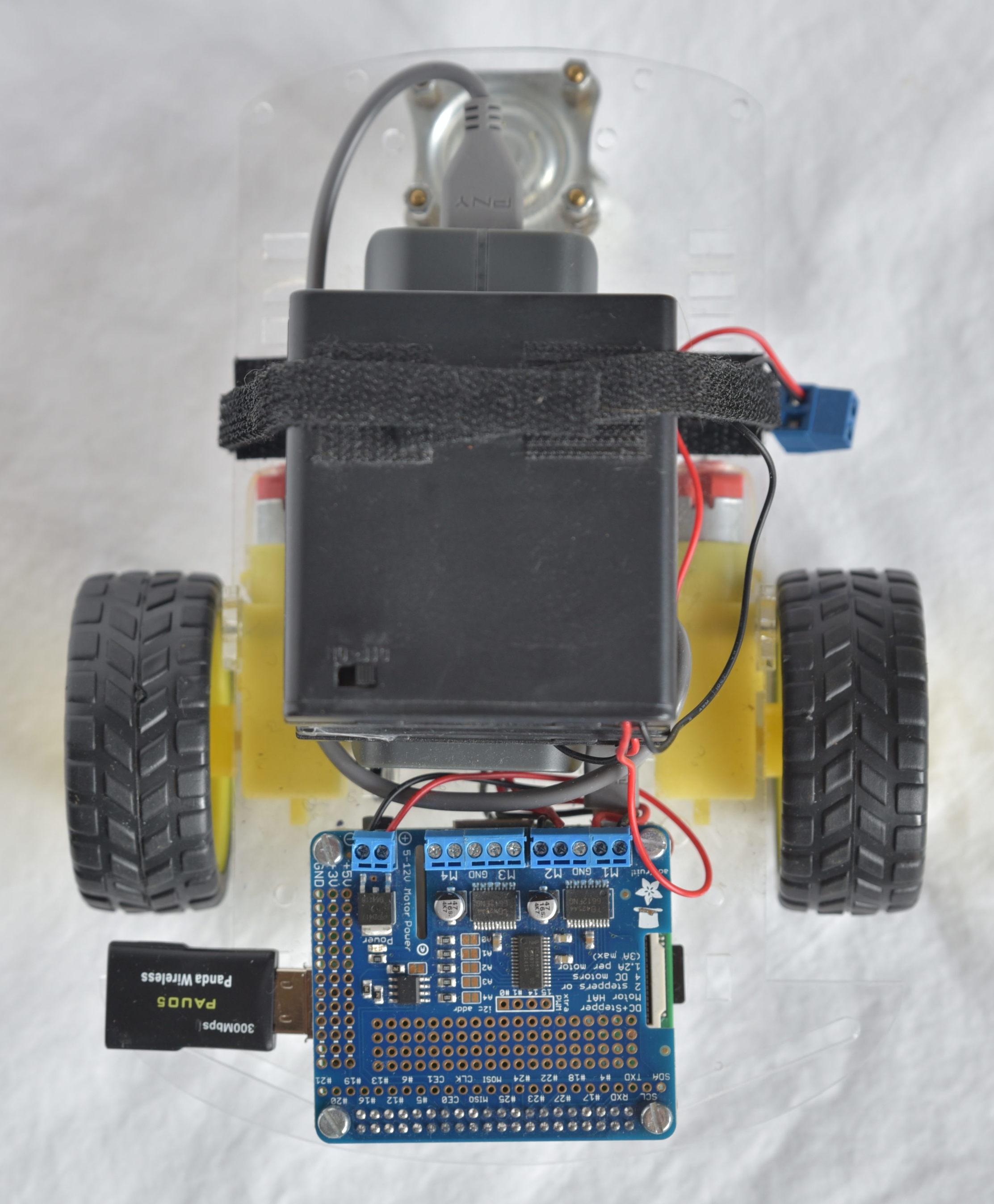
- USB Wifi Dongle (can be any dongle which works with Linux or Pi) Selected Panda 300Mbps Wireless N USB Adapter because it lists Linux compatibility and supports both infrastructure and ad-hoc modes. I intend to use Infrastructure mode to use PI as hotspot and connect to it rather than accessing it through existing hotspot inside the house.
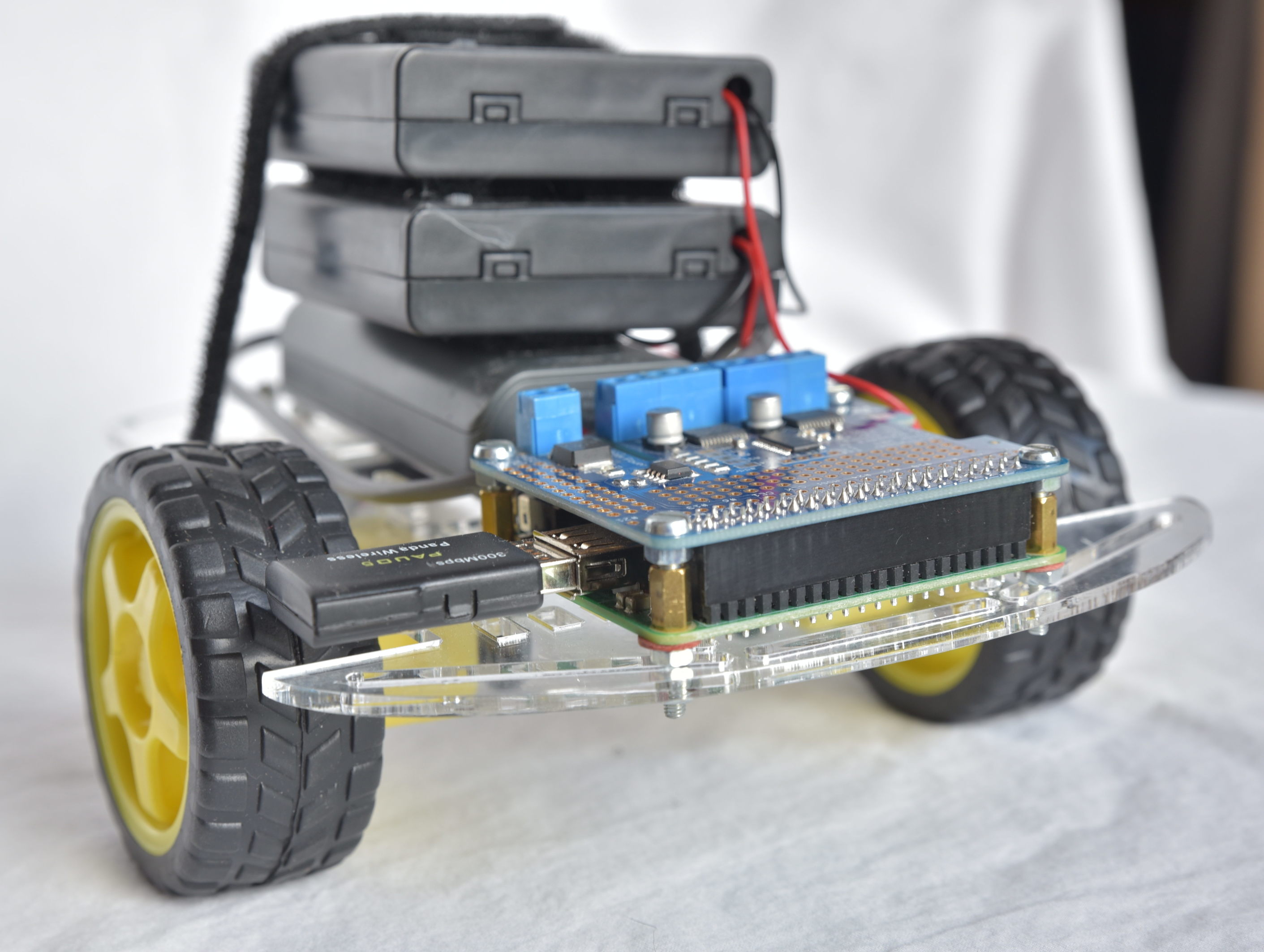
- Adafruit DC and stepper motor hat
- Rechargeable USB Power Bank for powering Raspberry Pi (can be almost any type capable powering Pi) Selected PNY T4400 (4400 mAh) can run Pi + USB Wifi module for about 8 hours
- AA Battery case holder for powering the motors
- Screw and stand-off kit for mounting things together
Software:
Hardware Setup:
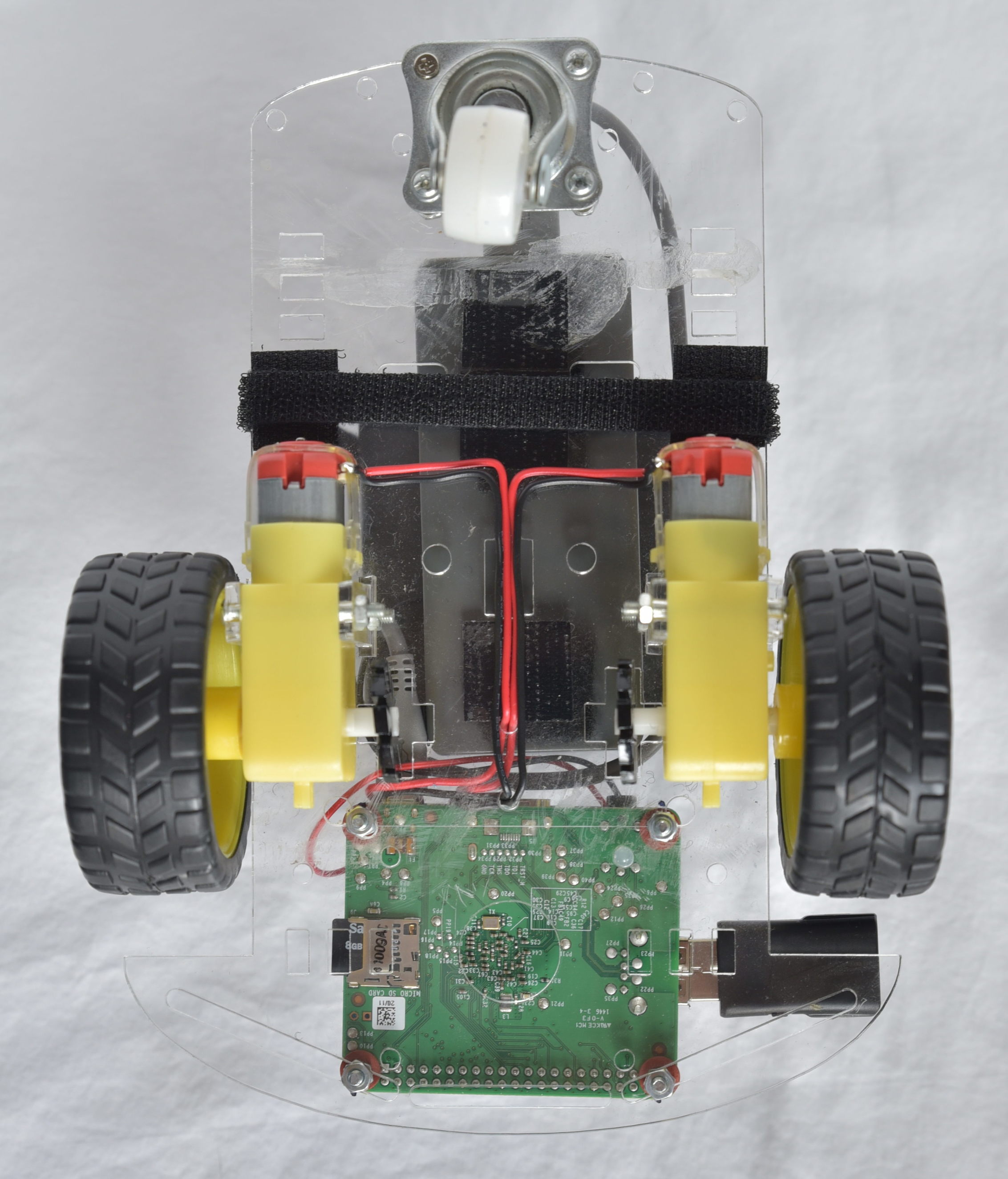
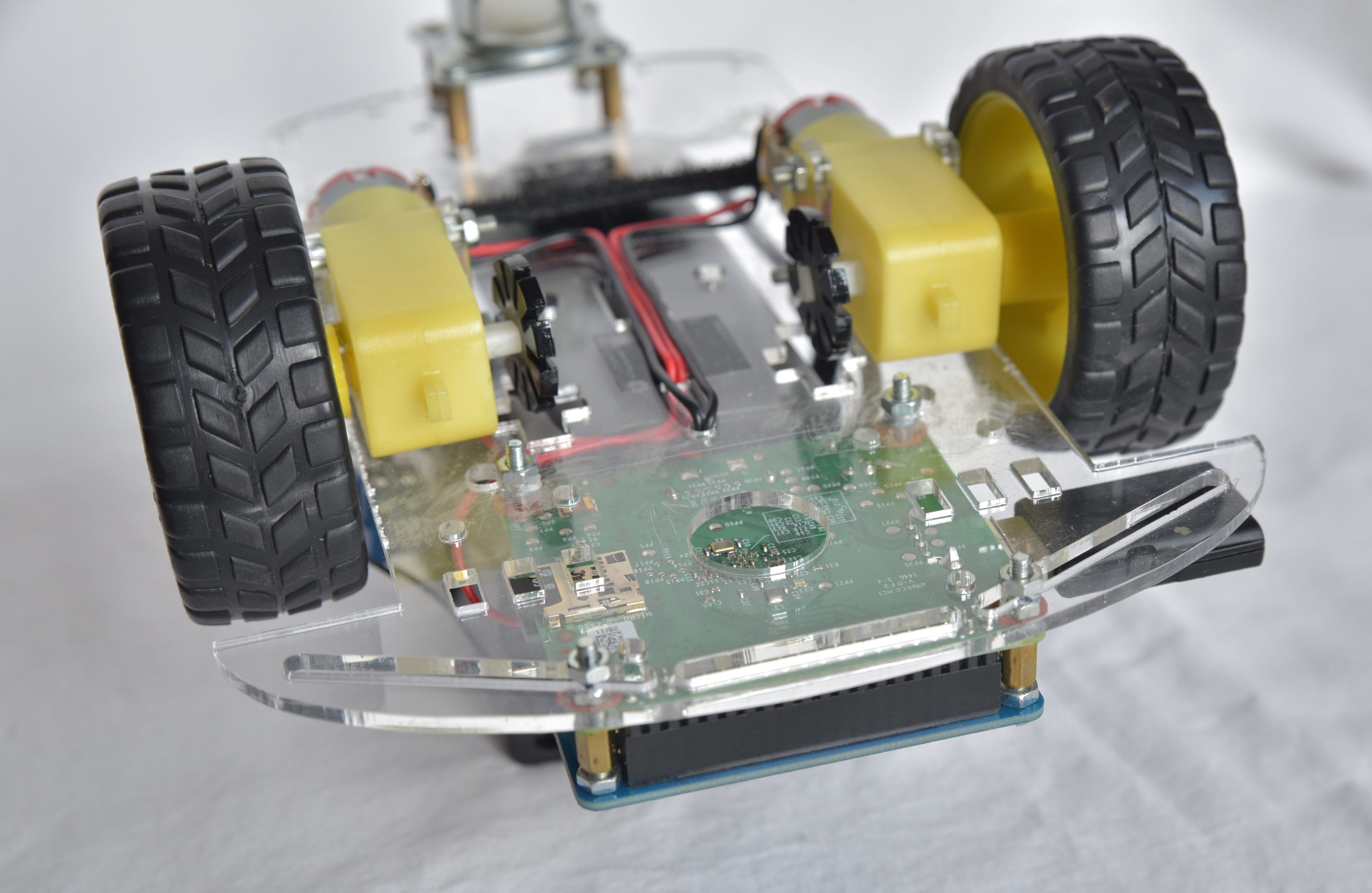
- Mount Raspberry Pi on the robot shasis using small (M3) bolts and nuts. In order to drill the mounting holes in the right places, print a template marking the Pi holes, fix it to the cart and dril through the paper marks.
- Solder in the motor hat connectors and mount the hat on the Pi. The best way to mount the cart, Pi and the hat together is using nylon stand offs.
- Connect power to PI
- Wire motor hat to motors
- Wire motor power to the motor hat
- Mount power/battery packs to the cart using self adhesive velcro strips, I used this one, but there are cheaper options out there.
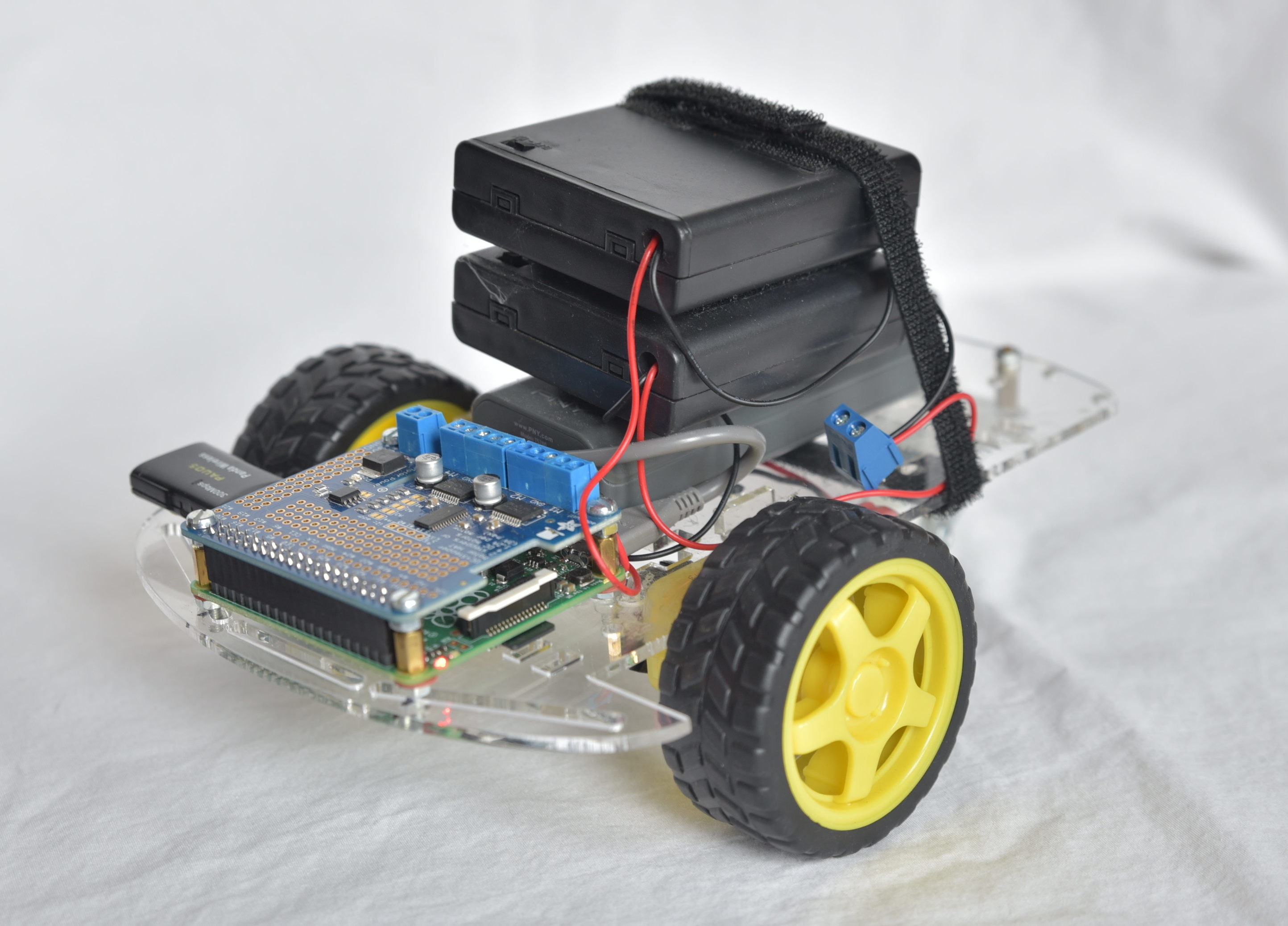
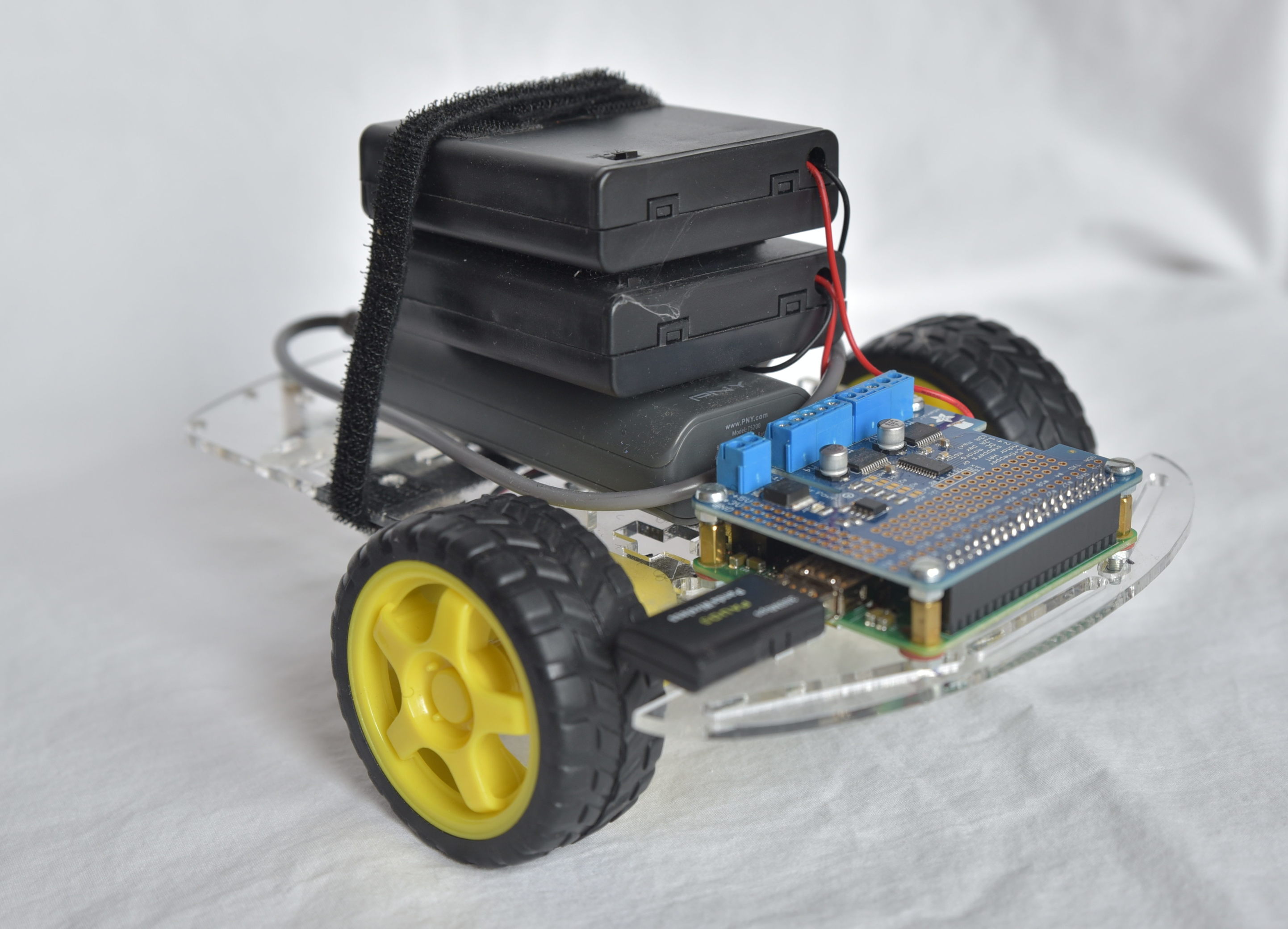
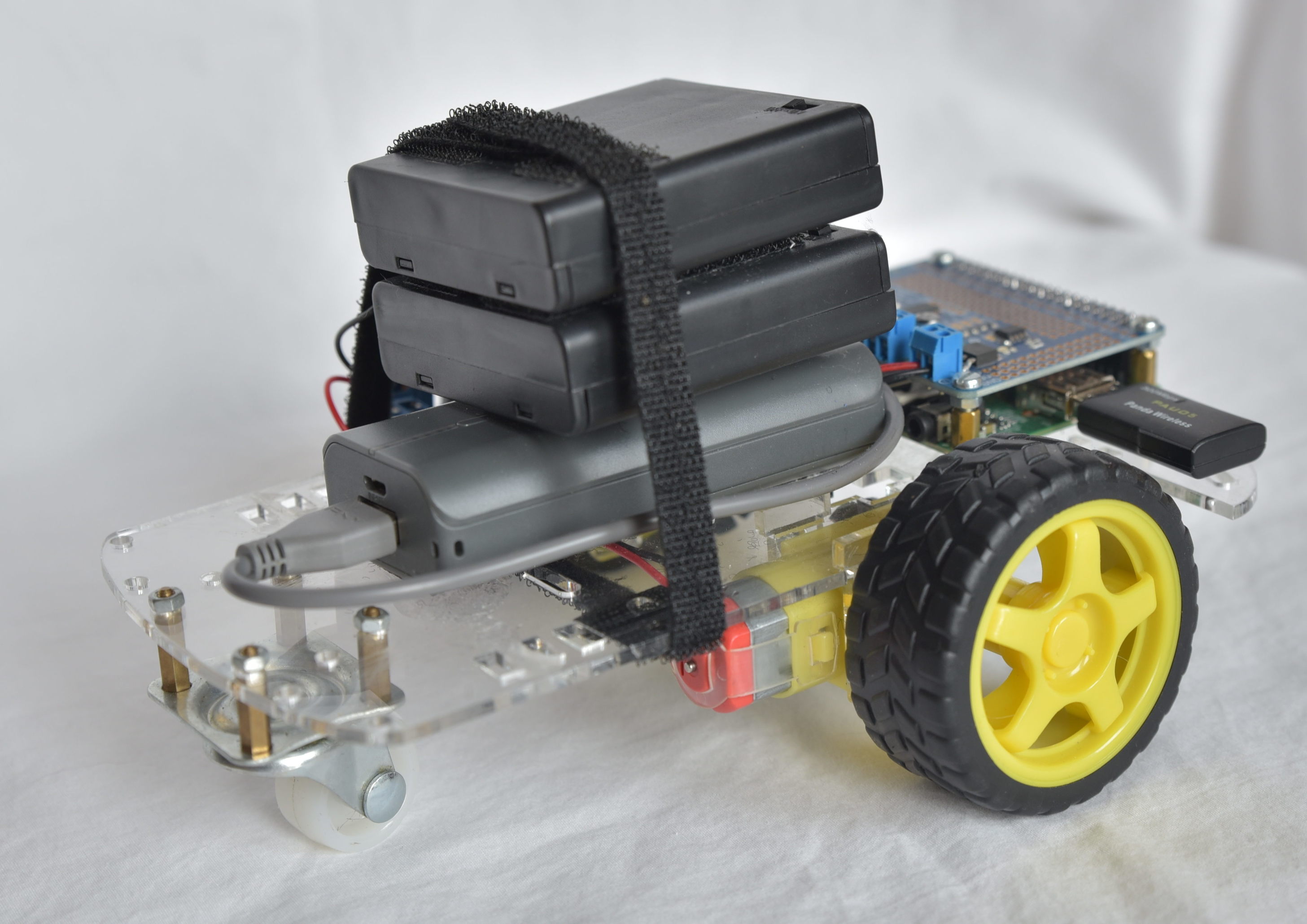
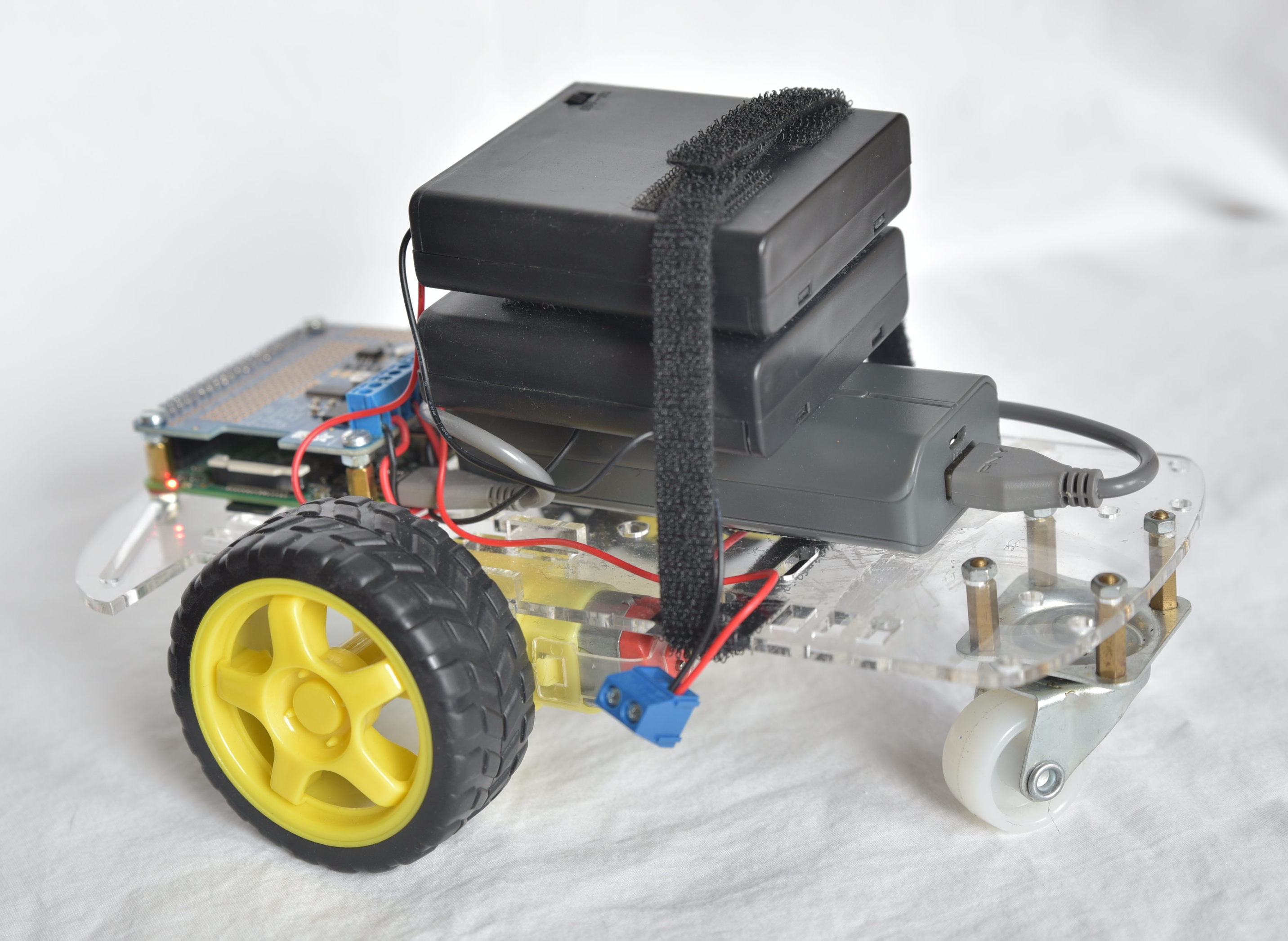
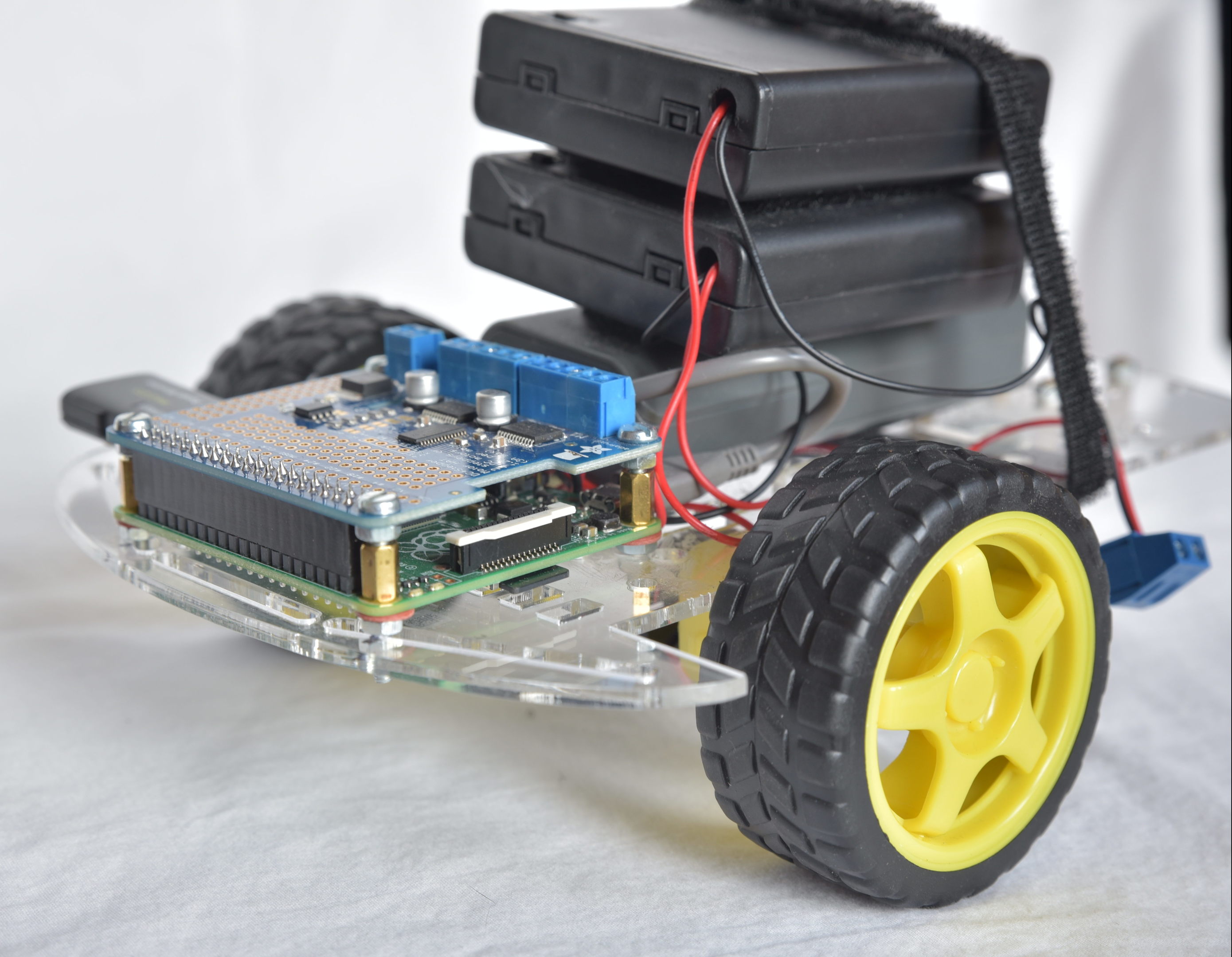
Hardware Build Images: